
Forwarded from Data Science by ODS.ai 🦜
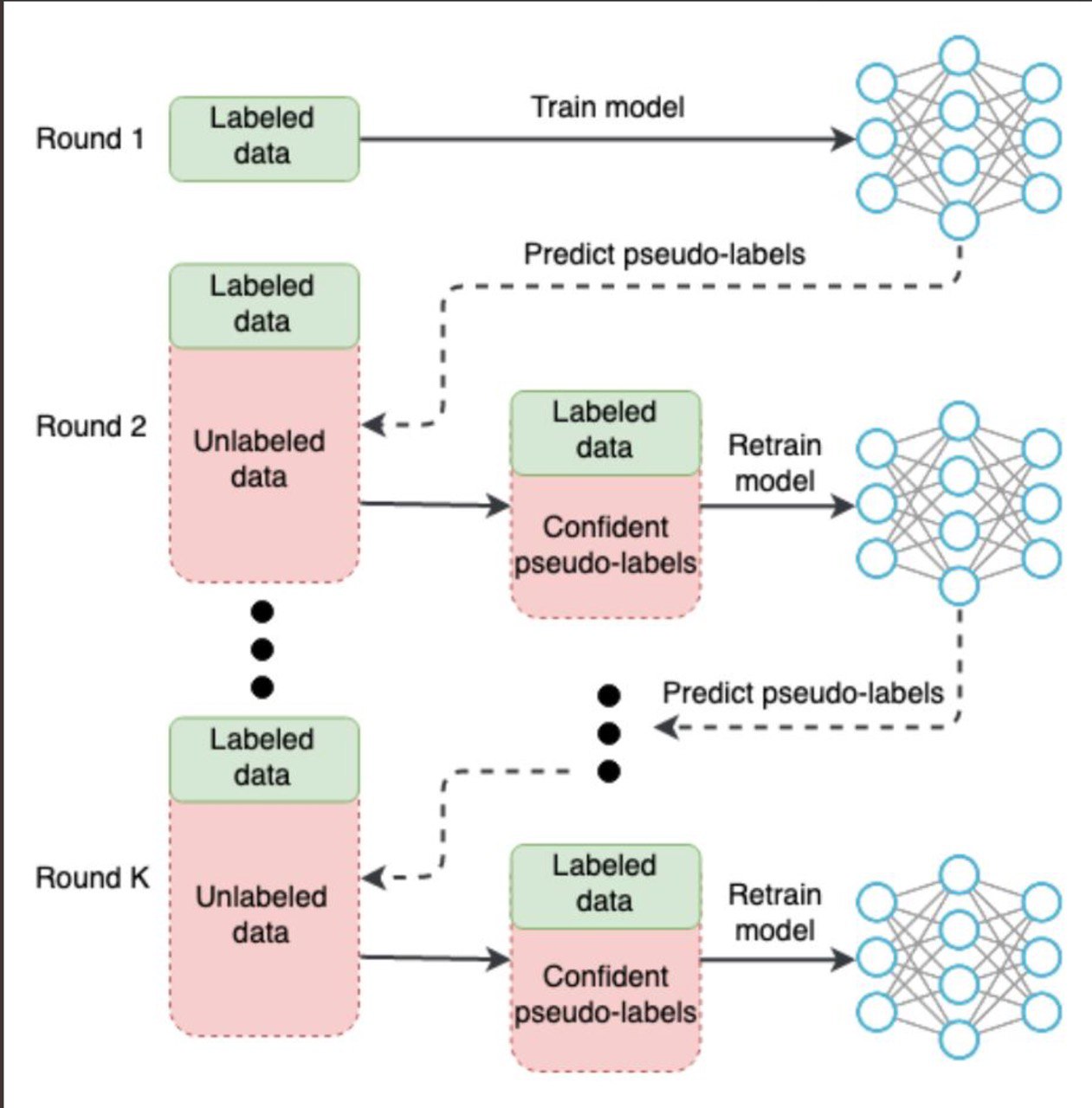
New paper on training with pseudo-labels for semantic segmentation
Semi-Supervised Segmentation of Salt Bodies in Seismic Images:
SOTA (1st place) at TGS Salt Identification Challenge.
Github: https://github.com/ybabakhin/kaggle_salt_bes_phalanx
ArXiV: https://arxiv.org/abs/1904.04445
#GCPR2019 #Segmentation #CV
Semi-Supervised Segmentation of Salt Bodies in Seismic Images:
SOTA (1st place) at TGS Salt Identification Challenge.
Github: https://github.com/ybabakhin/kaggle_salt_bes_phalanx
ArXiV: https://arxiv.org/abs/1904.04445
#GCPR2019 #Segmentation #CV
{kind=link}
Semantic-SAM — экспериментальный метод сегментации изображений, опирающийся на на Mask DINO, OpenSeeD, SEEM и VLPart, выполняющий интерактивную сегментацию с возможностью управления уровнем детализации и семантической осведомленностью.
Этот проект - первая попытка обучения модели и на наборах данных (SA-1B) и на данных по сегментации фрагментов изображений (SAM).
Бенчмарки проведенные в ходе исследования демонстрируют, что такое обучение положительно сказывается на точности Semantic-SAM.
🤗 Попробовать интерактивную демонстрация многоуровневой детализации
🤗 Попробовать авто-генерацию с контролируемой детализацией
@ai_machinelearning_big_data
#ML #SAM #Segmentation #Recognition
Please open Telegram to view this post
VIEW IN TELEGRAM
Please open Telegram to view this post
VIEW IN TELEGRAM
👍28❤8🥰4
Segment Anything Model (SAM) - это набор базовых моделей, которые позволяют автоматически сегментировать любые объекты, независимо от их формы, размера и расположения на изображении и видео.
Meta без официального пресс-релиза обновила модели SAM до версии 2.1. Обновление минорное :
Набор моделей: tiny, small, base_plus и large остался прежним, как и их размеры и производительность.
⚠️ Чтобы использовать новые модели SAM 2.1, необходима последняя версия кода из репозитория. Если установлена более ранняя версия, ее необходимо сначала удалить с помощью
pip uninstall SAM-2.Демо-ноутбуки для запуска в Google Collab:
@ai_machinelearning_big_data
#AI #ML #SAM2 #META #Segmentation #CV
Please open Telegram to view this post
VIEW IN TELEGRAM
Please open Telegram to view this post
VIEW IN TELEGRAM
👍28❤6🔥6🥰1
3D-сегментация объектов на семантические части — задача не новая, но большинство методов до сих пор работают только с видимыми поверхностями, игнорируя скрытые области. Это ограничивает их применение в задачах анимации и редактирования геометрии, где нужны полные части.
HoloPart — модель, разработанная VastAI, которая решает проблему амодальной сегментации для 3D-объектов, восстанавливая скрытые фрагменты. С HoloPart можно, например, изменить размер колес у машины, добавить детали или перераспределить материалы между частями. Для художников и инженеров это экономит часы ручной работы.
Модель работает в 2 этапа: сначала стандартная сегментация выделяет видимые части, а затем HoloPart достраивает их до полных 3D-форм, используя комбинацию из локального и глобального внимания. Локальные механизмы фокусируются на деталях каждой части, а контекстное внимание следит, чтобы восстановленные элементы не конфликтовали с общей структурой объекта.
Эксперименты на датасетах ABO и PartObjaverse-Tiny показали, что HoloPart обходит конкурентов - PatchComplete и DiffComplete по всем метрикам. Средний Chamfer Distance (показывает точность совпадения форм) у HoloPart — 0.026 против 0.087 у DiffComplete на ABO. А F-Score, оценивающий полноту восстановления, достигает 0.848 против 0.371 у аналогов.
⚠️ Перед тем, как загрузить целевой glb-файл в HoloPart ytj необходимо выполнить сегментацию сторонними средствами. Разработчики рекомендуют SAMPart3D и SAMesh.
# Clone the repo
git clone https://github.com/VAST-AI-Research/HoloPart.git
cd HoloPart
# Create a conda env
conda create -n holopart python=3.10
conda activate holopart
# Install dependencies
pip install torch torchvision --index-url https://download.pytorch.org/whl/{your-cuda-version}
pip install -r requirements.txt
# Step 1: Prepare segmented mesh with a mesh file and mask
import trimesh
import numpy as np
mesh = trimesh.load("mesh.glb", force="mesh")
mask_npy = np.load("mask.npy")
mesh_parts = []
for part_id in np.unique(mask_npy):
mesh_part = mesh.submesh([mask_npy == part_id], append=True)
mesh_parts.append(mesh_part)
mesh_parts = trimesh.Scene(mesh_parts).export("input_mesh.glb")
# Step 2: Decompose the 3D mesh into complete parts:
python -m scripts.inference_holopart --mesh-input assets/example_data/file.glb
@ai_machinelearning_big_data
#AI #ML #3D #HoloPart #Segmentation #VastAI
Please open Telegram to view this post
VIEW IN TELEGRAM
Please open Telegram to view this post
VIEW IN TELEGRAM
👍36🔥21❤14