Forwarded from Малоизвестное интересное
Самодельный робот-собачка за $1K – предвестник революции роботов
Многие считают, что техно-революции происходят при скачкообразном росте возможностей продуктов новых технологий. Однако, на самом деле, это совсем не так.
Техно-революции происходят при скачкообразном снижении цен на такие продукты. Персоналки, лаптопы, айподы, айпады, айфоны и т.п., к моменту их превращения в массовый продукт, обладали возможностями (функционалом), придуманными и реализованными за годы до этого.
Но вот бах – цена на гаджет вдруг резко упала … И началась очередная техно-революция.
С роботами все произойдет ровно так же.
Как ни чаруют нас пируэты, выписываемые четвероногими роботами, типа SpotMini и RHex от Boston Dynamics, но никому даже не приходит в голову говорить о техно-революции, пока эти «песики» стоят как хорошее авто.
А за сколько бы вы купили себе механического четвероногого друга, способного выполнять широчайший набор функций – от антидепрессанта до поводыря?
Исследователи из Центра киберфизических систем, IISc, Бангалор, Индия, совершили прорыв, создав робота-собачку за $1K. Его зовут Stoch (на русском имя надо менять во избежание ассоциации «чтоб ты stoch»).
Помимо главного отличия – цены, в 30 раз ниже всех подобных роботов, этот песик размером с болонку:
- собирается, подобно мебели IKEA из набора стандартных деталей, часть из которых печатается на 3D принтере;
- способен бегать разными аллюрами (рысь, галоп, …) без всякого там Глубокого Обучения, и даже без датчиков обратной связи.
Т.е. ни тебе больших данных, ни высокой вычислительной производительности, ничего дорого и сложного. Всего-то 4 ноги с сегментами по 120 мм и суставами, гнущимися под 45 и 70 градусов со скоростью 461 градус в сек. Да по сервомоторчику 16W на каждую ногу. Да одна плата Raspberry Pi 3b, рассчитывающая с помощью системы нелинейных дифф-уравнений координаты, которые затем используются для генерации углов соединения посредством обратной кинематики. И всё!
А бегает и скачет собачка вполне приемлемо. И когда ей добавят несколько датчиков обратной связи будет хоть вальс танцевать, хоть на задних лапках служить.
И учтите, будучи запущенной в серию, даже с учетом украшения собачки пушистой шкурой с хвостом, цена собачки будет не дороже смартфона.
А значит революция роботов начинается.
• 2 минутное видео про Stoch (конструкция, принцип работы и живое бегание) https://www.youtube.com/watch?v=Wxx9pwwTIL4&feature=youtu.be
• Исчерпывающая авторская статья про Stoch https://arxiv.org/abs/1901.00697
#Роботы
Многие считают, что техно-революции происходят при скачкообразном росте возможностей продуктов новых технологий. Однако, на самом деле, это совсем не так.
Техно-революции происходят при скачкообразном снижении цен на такие продукты. Персоналки, лаптопы, айподы, айпады, айфоны и т.п., к моменту их превращения в массовый продукт, обладали возможностями (функционалом), придуманными и реализованными за годы до этого.
Но вот бах – цена на гаджет вдруг резко упала … И началась очередная техно-революция.
С роботами все произойдет ровно так же.
Как ни чаруют нас пируэты, выписываемые четвероногими роботами, типа SpotMini и RHex от Boston Dynamics, но никому даже не приходит в голову говорить о техно-революции, пока эти «песики» стоят как хорошее авто.
А за сколько бы вы купили себе механического четвероногого друга, способного выполнять широчайший набор функций – от антидепрессанта до поводыря?
Исследователи из Центра киберфизических систем, IISc, Бангалор, Индия, совершили прорыв, создав робота-собачку за $1K. Его зовут Stoch (на русском имя надо менять во избежание ассоциации «чтоб ты stoch»).
Помимо главного отличия – цены, в 30 раз ниже всех подобных роботов, этот песик размером с болонку:
- собирается, подобно мебели IKEA из набора стандартных деталей, часть из которых печатается на 3D принтере;
- способен бегать разными аллюрами (рысь, галоп, …) без всякого там Глубокого Обучения, и даже без датчиков обратной связи.
Т.е. ни тебе больших данных, ни высокой вычислительной производительности, ничего дорого и сложного. Всего-то 4 ноги с сегментами по 120 мм и суставами, гнущимися под 45 и 70 градусов со скоростью 461 градус в сек. Да по сервомоторчику 16W на каждую ногу. Да одна плата Raspberry Pi 3b, рассчитывающая с помощью системы нелинейных дифф-уравнений координаты, которые затем используются для генерации углов соединения посредством обратной кинематики. И всё!
А бегает и скачет собачка вполне приемлемо. И когда ей добавят несколько датчиков обратной связи будет хоть вальс танцевать, хоть на задних лапках служить.
И учтите, будучи запущенной в серию, даже с учетом украшения собачки пушистой шкурой с хвостом, цена собачки будет не дороже смартфона.
А значит революция роботов начинается.
• 2 минутное видео про Stoch (конструкция, принцип работы и живое бегание) https://www.youtube.com/watch?v=Wxx9pwwTIL4&feature=youtu.be
• Исчерпывающая авторская статья про Stoch https://arxiv.org/abs/1901.00697
#Роботы
YouTube
Design, Development and Experimental Realization of a Quadrupedal Research Platform: Stoch
Video attachment accepted for presentation in ICCAR 2019. Pre-print (on Arxiv) of the paper can be found in in the following link: https://arxiv.org/abs/1901.00697
Learning methods associated with the hardware (accepted for ICRA 2019): https://www.youtub…
Learning methods associated with the hardware (accepted for ICRA 2019): https://www.youtub…
🥇 Искусственный интеллект победил человека в гонке квадрокоптеров.
Швейцарские эксперты по робототехнике создали алгоритм, который управляет беспилотником более по-человечески, делая резкие и отрывистые маневры.
💬 По словам разработчиков, модель использует очень сложные вычисления, которые заранее выполняют на мощном компьютере — просчет нескольких минут полета может занять несколько часов. Однако исследователи работают над оптимизацией алгоритма для его работы в реальном времени.
#роботы
_______
Источник | #forklogAI
Швейцарские эксперты по робототехнике создали алгоритм, который управляет беспилотником более по-человечески, делая резкие и отрывистые маневры.
💬 По словам разработчиков, модель использует очень сложные вычисления, которые заранее выполняют на мощном компьютере — просчет нескольких минут полета может занять несколько часов. Однако исследователи работают над оптимизацией алгоритма для его работы в реальном времени.
#роботы
_______
Источник | #forklogAI
Science
Time-optimal planning for quadrotor waypoint flight
Quadrotors are among the most agile flying robots. However, planning time-optimal trajectories at the actuation limit through multiple waypoints remains an open problem. This is crucial for applications such as inspection, delivery, search and rescue, and…
This media is not supported in your browser
VIEW IN TELEGRAM
🤖 Робопес за 60 минут научился ходить без тренировок в компьютерной симуляции.
Исследователи из Калифорнийского университета в Беркли задействовали метод обучения с подкреплением. Они разработали алгоритм Dreamer, использующий прошлый опыт для построения модели окружающего мира и прогнозирующий результаты потенциальных действий.
💬 По словам ученых, виртуальный обучающий симулятор никогда не будет таким точным, как реальность. Dreamer поможет роботам освоить новые навыки и приспособиться к неожиданным ситуациям.
#исследование #роботы
_______
Источник | #forklogAI
Исследователи из Калифорнийского университета в Беркли задействовали метод обучения с подкреплением. Они разработали алгоритм Dreamer, использующий прошлый опыт для построения модели окружающего мира и прогнозирующий результаты потенциальных действий.
💬 По словам ученых, виртуальный обучающий симулятор никогда не будет таким точным, как реальность. Dreamer поможет роботам освоить новые навыки и приспособиться к неожиданным ситуациям.
#исследование #роботы
_______
Источник | #forklogAI
🚜 Роботизация сельского хозяйства. Борьба с сорняками
Solix - автономно и прицельно уничтожит сорняки
Роботы Solix - проект компании Solinftec (СП США и Бразилии) по выпуску автономных мобильных сельскохозяйственных роботов.
Энергоустановка робота основана на четырех солнечных панелях.
Робот перемещается по полю, сканируя растения. Система ИИ Alice анализирует фотографию и выдает заключение - это культура или сорняк. Сорняки робот точечно обрабатывает гербицидом.
Также Solix составит цифровую карту поля, где будут показаны точки обнаружения сорняков.
Производительность - до 40 га в сутки.
Робот ориентирован на работу с такими культурами, как пшеница, соя и кукуруза. Начало коммерциализации планируется в 2025 году.
Видео
#роботы #роботизация #мобильныероботы #земледелие #сорняки
👉 Каталог автономных сельскохозяйственных роботов для работы в поле, в саду или теплице
_______
Источник | #prorobots
Solix - автономно и прицельно уничтожит сорняки
Роботы Solix - проект компании Solinftec (СП США и Бразилии) по выпуску автономных мобильных сельскохозяйственных роботов.
Энергоустановка робота основана на четырех солнечных панелях.
Робот перемещается по полю, сканируя растения. Система ИИ Alice анализирует фотографию и выдает заключение - это культура или сорняк. Сорняки робот точечно обрабатывает гербицидом.
Также Solix составит цифровую карту поля, где будут показаны точки обнаружения сорняков.
Производительность - до 40 га в сутки.
Робот ориентирован на работу с такими культурами, как пшеница, соя и кукуруза. Начало коммерциализации планируется в 2025 году.
Видео
#роботы #роботизация #мобильныероботы #земледелие #сорняки
👉 Каталог автономных сельскохозяйственных роботов для работы в поле, в саду или теплице
_______
Источник | #prorobots
VK
Робомилк
🚜 Роботизация сельского хозяйства. Борьба с сорняками
Solix - автономно и прицельно уничтожит сорняки
Роботы Solix - проект компании Solinftec (СП США и Бразилии) по выпуску автономных мобильных сельскохозяйственных роботов.
Энергоустановка робота основана…
Solix - автономно и прицельно уничтожит сорняки
Роботы Solix - проект компании Solinftec (СП США и Бразилии) по выпуску автономных мобильных сельскохозяйственных роботов.
Энергоустановка робота основана…
🦿 Инженеры из Стэнфордского университета разработали экзоскелет для ног, оборудованный датчиками, одноплатным компьютером и алгоритмами искусственного интеллекта.
По словам исследователей, ИИ-модель персонализируется за один час. Она настраивает устройство и двигает лодыжкой, заменяя некоторые функции икроножной мышцы. Благодаря этому конечность отталкивается от земли и делает шаг, позволяя владельцу ходить быстрее с меньшими усилиями.
🏃 Ученые надеются, что разработка поможет пожилым или испытывающим трудности с мышцами людям передвигаться свободнее.
forklog.com
#исследование #роботы
_______
Источник | #forklogAI
По словам исследователей, ИИ-модель персонализируется за один час. Она настраивает устройство и двигает лодыжкой, заменяя некоторые функции икроножной мышцы. Благодаря этому конечность отталкивается от земли и делает шаг, позволяя владельцу ходить быстрее с меньшими усилиями.
🏃 Ученые надеются, что разработка поможет пожилым или испытывающим трудности с мышцами людям передвигаться свободнее.
forklog.com
#исследование #роботы
_______
Источник | #forklogAI
ForkLog
Ученые создали легкий экзоскелет с искусственным интеллектом
Исследователи из Стэнфордского университета разработали экзоскелет с датчиками и ИИ-алгоритмами, предназначенными для улучшения его характеристик.
🇺🇦 Украина получит 14 вооруженных беспилотных наземных транспортных средств THeMIS.
Соответствующий контракт подписали эстонский производитель робототехники и автономных систем Milrem Robotics и немецкая оборонная компания Krauss-Maffei Wegmann. Передача финансируется Министерством обороны Германии.
🤖 По данным Milrem Robotics, до конца 2022 года Украина получит семь беспилотников для эвакуации раненых. Остальные THeMIS сконфигурируют для расчистки маршрутов с полезной нагрузкой. Их поставка запланирована на второй квартал 2023 года.
#Украина #роботы
_______
Источник | #forklogAI
Соответствующий контракт подписали эстонский производитель робототехники и автономных систем Milrem Robotics и немецкая оборонная компания Krauss-Maffei Wegmann. Передача финансируется Министерством обороны Германии.
🤖 По данным Milrem Robotics, до конца 2022 года Украина получит семь беспилотников для эвакуации раненых. Остальные THeMIS сконфигурируют для расчистки маршрутов с полезной нагрузкой. Их поставка запланирована на второй квартал 2023 года.
#Украина #роботы
_______
Источник | #forklogAI
🤖 Специалисты из Google представили подход, позволяющий роботам эффективно протирать столы от крошек и жидкости в сложных средах.
Эксперты объединили методы обучения с подкреплением (RL) и оптимизации траекторий. Первый предоставляет роботу возможность выбирать действия по очистке поверхности, а второй определять команды для всего тела с учетом физических ограничений и предотвращения столкновений.
Исследователи использовали симулятор стохастического дифференциального уравнения задачи протирания стола для тренировки RL-политики планированию высокого уровня. По их словам, это позволяет избежать необходимости в обучающих данных для конкретной задачи.
🧽 Специалисты протестировал метод на роботе. Они заявили, что по сравнению с основанными на эвристике подходами он требует меньшего количества салфеток для очистки разливов и крошек с поверхности. Устройство не смахивает случайно мусор со стола и в процессе уборки не сталкивается с препятствиями вроде стульев.
#Google #роботы
_______
Источник | #forklogAI
by @F_S_C_P
Попробуй ⛵️MIDJOURNEY в Telegram
Эксперты объединили методы обучения с подкреплением (RL) и оптимизации траекторий. Первый предоставляет роботу возможность выбирать действия по очистке поверхности, а второй определять команды для всего тела с учетом физических ограничений и предотвращения столкновений.
Исследователи использовали симулятор стохастического дифференциального уравнения задачи протирания стола для тренировки RL-политики планированию высокого уровня. По их словам, это позволяет избежать необходимости в обучающих данных для конкретной задачи.
🧽 Специалисты протестировал метод на роботе. Они заявили, что по сравнению с основанными на эвристике подходами он требует меньшего количества салфеток для очистки разливов и крошек с поверхности. Устройство не смахивает случайно мусор со стола и в процессе уборки не сталкивается с препятствиями вроде стульев.
#Google #роботы
_______
Источник | #forklogAI
by @F_S_C_P
Попробуй ⛵️MIDJOURNEY в Telegram
YouTube
Robotic Table Wiping via Reinforcement Learning and Whole-body Trajectory Optimization
Our approach combines the strengths of reinforcement learning (RL) - planning in high-dimensional observation spaces with complex stochastic dynamics, and of trajectory optimization - guaranteeing constraints satisfaction while executing whole-body trajectories.…
This media is not supported in your browser
VIEW IN TELEGRAM
🤖 Google обучила парк роботов сортировать мусор.
Исследователи тестировали технологию в течение двух лет. Они использовали метод глубокого обучения с подкреплением на основе реальных данных в комбинации с тренировками в симуляциях.
♻️ Для сбора датасета специалисты запрограммировали 30 роботов искать по офису мусоросортировочные станции и распределять объекты между баками определенным образом. Например, банки и бутылки требовалось отнести в контейнер для вторсырья, а бумажные стаканчики — к компосту.
Еще 20 роботов сортировали мусор в специально оборудованных «классах».
Всего исследователи провели около 572 500 тестов. По их словам, с увеличением объема данных производительность устройств повышалась.
👀 В результате система научилась правильно сортировать 84% объектов.
#Google #роботы
_______
Источник | #forklogAI
by @F_S_C_P
Попробуй ⛵️MIDJOURNEY в Telegram
Исследователи тестировали технологию в течение двух лет. Они использовали метод глубокого обучения с подкреплением на основе реальных данных в комбинации с тренировками в симуляциях.
♻️ Для сбора датасета специалисты запрограммировали 30 роботов искать по офису мусоросортировочные станции и распределять объекты между баками определенным образом. Например, банки и бутылки требовалось отнести в контейнер для вторсырья, а бумажные стаканчики — к компосту.
Еще 20 роботов сортировали мусор в специально оборудованных «классах».
Всего исследователи провели около 572 500 тестов. По их словам, с увеличением объема данных производительность устройств повышалась.
👀 В результате система научилась правильно сортировать 84% объектов.
#Google #роботы
_______
Источник | #forklogAI
by @F_S_C_P
Попробуй ⛵️MIDJOURNEY в Telegram
Революция роботов намечена на март.
Такого техно-прорыва не было со времен Прометея.
Суть ожидаемого прорыва – разрешение парадокса Моравека, несокрушимой стеной преграждающего путь к человекоподобному Сильному-ИИ (AGI), а потом и к Супер-ИИ.
Логика здесь проста:
• Для достижения уровня AGI, интеллектуальный агент должен иметь тело (именно оно будет «жить», адаптируясь к внешней среде и взаимодействуя с ней и себе подобными)
• Однако, на пути к отелесниванию ИИ стоит парадокс Моравека, согласно которому. управление низкоуровневыми сенсомоторными операциями (операциями тела) требует огромных вычислительных ресурсов, - даже больших, чем управление высококогнитивными процессами (сложными мысленными операциями мозга).
• Т.е. без человекоподобного тела (робота - андроида) не будет AGI, а для «жизни» андроиду не хватает вычислительных ресурсов.
Что обещают в марте.
Бернт Борних - СЕО компании 1Х (на которую OpenAI сделал ставку в робототехнике андроидов), - объявил, что в марте, похоже, будет доказано, что ограничение парадокса Моравека было ложное, и оно возникало всего лишь из-за банальной нехватки данных [1].
Речь, скорее всего, идет о выпуске андроида NEO - «брата» Евы (андроид EVE). NEO будет превосходить «сестру» во многом и кроме того, будет передвигаться на ногах, а не на колесах.
Январская демонстрация Евы (демонстрация [2] и ее разбор [0]) была настолько поразительной, что редакция IEEE Spectrum даже провела свое расследование – не прятались ли под костюмами андроидов люди. Но все оказалось чисто – не подкопаешься [3].
Фишка андроидов компании 1Х в движке, разработанном OpenAI. Это нейронка, как и разум человека, работает, учась на данных, поступающих от зрения, и генерирующая действия (управление движением, руками, захватами, туловищем и головой) с частотой 10 Гц.
«Базовая модель» понимает широкий спектр физического поведения: от уборки дома до сбора предметов на складе и социального взаимодействия с людьми и другими роботами. Но самое главное в том, что новые навыки появляются у андроида всего за несколько минут сбора данных и обучения, - путем наблюдения за тем, как это делают люди.
Для скептиков, сомневающихся в грядущем опровержении парадокса Моравека (даже если за этим видны уши OpenAI), рекомендую объявление, сделанное позавчера Тэдом Сяо (главным спецом по робототехнике (Senior Research Scientist) в Google DeepMind Robotics).
Тэд написал так [4]:
«В ближайшие недели выйдет 3-4 крупных новости, которые потрясут сферу робототехники и искусственного интеллекта.
Скорректируйте свои планы, 2024 год будет сумасшедшим.»
О том же пишет и Джеймс Дарпиниан в лучшем на сегодня обзоре ТОР 20-тки андроидов мира [5]:
Святой Грааль - ходячий, говорящий и полезный андроид из научной фантастики, -внезапно оказывается в пределах досягаемости.
Так что, ждем революцию роботов в марте.
#Роботы
0 www.youtube.com
1 twitter.com
2 www.youtube.com
3 spectrum.ieee.org
4 twitter.com
5 james.darpinian.com
_______
Источник | #theworldisnoteasy
@F_S_C_P
Генерируй картинки с ⛵️MIDJOURNEY в Telegram
Такого техно-прорыва не было со времен Прометея.
Суть ожидаемого прорыва – разрешение парадокса Моравека, несокрушимой стеной преграждающего путь к человекоподобному Сильному-ИИ (AGI), а потом и к Супер-ИИ.
Логика здесь проста:
• Для достижения уровня AGI, интеллектуальный агент должен иметь тело (именно оно будет «жить», адаптируясь к внешней среде и взаимодействуя с ней и себе подобными)
• Однако, на пути к отелесниванию ИИ стоит парадокс Моравека, согласно которому. управление низкоуровневыми сенсомоторными операциями (операциями тела) требует огромных вычислительных ресурсов, - даже больших, чем управление высококогнитивными процессами (сложными мысленными операциями мозга).
• Т.е. без человекоподобного тела (робота - андроида) не будет AGI, а для «жизни» андроиду не хватает вычислительных ресурсов.
Что обещают в марте.
Бернт Борних - СЕО компании 1Х (на которую OpenAI сделал ставку в робототехнике андроидов), - объявил, что в марте, похоже, будет доказано, что ограничение парадокса Моравека было ложное, и оно возникало всего лишь из-за банальной нехватки данных [1].
Речь, скорее всего, идет о выпуске андроида NEO - «брата» Евы (андроид EVE). NEO будет превосходить «сестру» во многом и кроме того, будет передвигаться на ногах, а не на колесах.
Январская демонстрация Евы (демонстрация [2] и ее разбор [0]) была настолько поразительной, что редакция IEEE Spectrum даже провела свое расследование – не прятались ли под костюмами андроидов люди. Но все оказалось чисто – не подкопаешься [3].
Фишка андроидов компании 1Х в движке, разработанном OpenAI. Это нейронка, как и разум человека, работает, учась на данных, поступающих от зрения, и генерирующая действия (управление движением, руками, захватами, туловищем и головой) с частотой 10 Гц.
«Базовая модель» понимает широкий спектр физического поведения: от уборки дома до сбора предметов на складе и социального взаимодействия с людьми и другими роботами. Но самое главное в том, что новые навыки появляются у андроида всего за несколько минут сбора данных и обучения, - путем наблюдения за тем, как это делают люди.
Для скептиков, сомневающихся в грядущем опровержении парадокса Моравека (даже если за этим видны уши OpenAI), рекомендую объявление, сделанное позавчера Тэдом Сяо (главным спецом по робототехнике (Senior Research Scientist) в Google DeepMind Robotics).
Тэд написал так [4]:
«В ближайшие недели выйдет 3-4 крупных новости, которые потрясут сферу робототехники и искусственного интеллекта.
Скорректируйте свои планы, 2024 год будет сумасшедшим.»
О том же пишет и Джеймс Дарпиниан в лучшем на сегодня обзоре ТОР 20-тки андроидов мира [5]:
Святой Грааль - ходячий, говорящий и полезный андроид из научной фантастики, -внезапно оказывается в пределах досягаемости.
Так что, ждем революцию роботов в марте.
#Роботы
0 www.youtube.com
1 twitter.com
2 www.youtube.com
3 spectrum.ieee.org
4 twitter.com
5 james.darpinian.com
_______
Источник | #theworldisnoteasy
@F_S_C_P
Генерируй картинки с ⛵️MIDJOURNEY в Telegram
YouTube
OpenAI Eve Humanoid Robot: The Most Versatile and Autonomous Humanoid Robot Ever Created
1X Eve Robot Powered by OpenAI is a humanoid robot that can perform a variety of tasks autonomously, without any human intervention or guidance. In this video, you will see how the Eve robot can pick up and place objects, open doors, and even plug itself…
Очень скоро война превратится в 5=ю казнь апокалипсиса.
Против умной «саранчи в железных нагрудниках» все бессильно.
«И грудь у неё была, словно железная броня, а шум её крыльев был подобен грохоту множества колесниц, влекомых скакунами, рвущимися в бой.» Откровение 9:7—9)
По Библии, пятой казнью апокалипсиса будет «саранча в железных нагрудниках», против которой никто и ничто не устоит.
В технологическом переложении 20-го века непобедимость роя «железной саранчи» прекрасно описал Станислав Лем в романе «Непобедимый». Там даже самый мощный робот космического корабля со знаковым именем «Непобедимый», вооружённый системой силовых полей и сферическим излучателем антиматерии, оказался бессилен перед миллиардным роем крохотных летающих роботов.
В современном переложении об этом пишут Эллиот Акерман и адмирал Джеймс Ставридис:
• в формате эссе «Рои беспилотников изменят баланс военной мощи» [1]
• в формате романа «2054», в котором они размышляют о многих аспектах и роли ИИ в будущих военных конфликтах [2].
Ключевая идея этих авторов проста и безотбойна – сочетание роя дронов с ИИ кардинально меняет ход боя.
«По своей сути ИИ — это технология, основанная на распознавании образов. В военной теории взаимодействие между распознаванием образов и принятием решений известно как цикл НОРД — наблюдать, ориентироваться, решать, действовать. Теория петли (цикла) НОРД, разработанная в 1950-х годах летчиком-истребителем ВВС Джоном Бойдом, утверждает, что сторона в конфликте, которая сможет быстрее пройти через петлю НОРД, будет обладать решающим преимуществом на поле боя».
Для максимально быстрого прохождения петли НОРД нужно автономное и адаптивное оружие.
• Промышленные роботы являются примером автономных, но неадаптивных машин: они неоднократно выполняют одну и ту же последовательность действий.
• И наоборот, беспилотные дроны являются примером адаптивных, но неавтономных машин: они демонстрируют адаптивные возможности своих удаленных людей-операторов.
Рой дронов столь же адаптивен, но неавтономен, как и единственный дрон. Но для дрона-одиночки эта проблема решается его связкой с оператором (или примитивизацией функций). А для роя дронов такого числа операторов не напасешься (и функции упрощать не хочется). Но невозможно запустить тысячи автономных дронов, пилотируемых отдельными людьми. А вычислительные возможности ИИ делают такие рои возможными.
Если роем будет управлять ИИ, проблема адаптивности и автономности роя более не существует. Связка роя и ИИ станет самым быстрым исполнителем прохождения петли НОРД.
Акерман и Ставридис пишут:
«Это изменит ведение войны. Гонка будет вестись не за лучшие платформы, а за лучший ИИ, управляющий этими платформами. Это война циклов НОРД, рой против роя. Победит та сторона, которая разработает систему принятия решений на основе ИИ, способную опередить противника. Война движется к конфликту "мозг против мозга"»
И оба мозга будут электронные, - добавлю я от себя.
P.S. В одном Аккерман и Ставридис, имхо, ошибаются:
• Рои дронов с ИИ – это лишь ближняя перспектива (т.н. ПЖРы – полуживые роботы [3])
• В 2054, про который пишется в романе, ПЖР уже уступят место еще более интеллектуально продвинутому «жидкому мозгу» [4]
#БПЛА #Война #ИИ #Роботы
1 www.wsj.com
2 www.penguinrandomhouse.com
3 https://t.iss.one/theworldisnoteasy/454
4 https://t.iss.one/theworldisnoteasy/654
_______
Источник | #theworldisnoteasy
@F_S_C_P
-------
поддержи канал
-------
Против умной «саранчи в железных нагрудниках» все бессильно.
«И грудь у неё была, словно железная броня, а шум её крыльев был подобен грохоту множества колесниц, влекомых скакунами, рвущимися в бой.» Откровение 9:7—9)
По Библии, пятой казнью апокалипсиса будет «саранча в железных нагрудниках», против которой никто и ничто не устоит.
В технологическом переложении 20-го века непобедимость роя «железной саранчи» прекрасно описал Станислав Лем в романе «Непобедимый». Там даже самый мощный робот космического корабля со знаковым именем «Непобедимый», вооружённый системой силовых полей и сферическим излучателем антиматерии, оказался бессилен перед миллиардным роем крохотных летающих роботов.
В современном переложении об этом пишут Эллиот Акерман и адмирал Джеймс Ставридис:
• в формате эссе «Рои беспилотников изменят баланс военной мощи» [1]
• в формате романа «2054», в котором они размышляют о многих аспектах и роли ИИ в будущих военных конфликтах [2].
Ключевая идея этих авторов проста и безотбойна – сочетание роя дронов с ИИ кардинально меняет ход боя.
«По своей сути ИИ — это технология, основанная на распознавании образов. В военной теории взаимодействие между распознаванием образов и принятием решений известно как цикл НОРД — наблюдать, ориентироваться, решать, действовать. Теория петли (цикла) НОРД, разработанная в 1950-х годах летчиком-истребителем ВВС Джоном Бойдом, утверждает, что сторона в конфликте, которая сможет быстрее пройти через петлю НОРД, будет обладать решающим преимуществом на поле боя».
Для максимально быстрого прохождения петли НОРД нужно автономное и адаптивное оружие.
• Промышленные роботы являются примером автономных, но неадаптивных машин: они неоднократно выполняют одну и ту же последовательность действий.
• И наоборот, беспилотные дроны являются примером адаптивных, но неавтономных машин: они демонстрируют адаптивные возможности своих удаленных людей-операторов.
Рой дронов столь же адаптивен, но неавтономен, как и единственный дрон. Но для дрона-одиночки эта проблема решается его связкой с оператором (или примитивизацией функций). А для роя дронов такого числа операторов не напасешься (и функции упрощать не хочется). Но невозможно запустить тысячи автономных дронов, пилотируемых отдельными людьми. А вычислительные возможности ИИ делают такие рои возможными.
Если роем будет управлять ИИ, проблема адаптивности и автономности роя более не существует. Связка роя и ИИ станет самым быстрым исполнителем прохождения петли НОРД.
Акерман и Ставридис пишут:
«Это изменит ведение войны. Гонка будет вестись не за лучшие платформы, а за лучший ИИ, управляющий этими платформами. Это война циклов НОРД, рой против роя. Победит та сторона, которая разработает систему принятия решений на основе ИИ, способную опередить противника. Война движется к конфликту "мозг против мозга"»
И оба мозга будут электронные, - добавлю я от себя.
P.S. В одном Аккерман и Ставридис, имхо, ошибаются:
• Рои дронов с ИИ – это лишь ближняя перспектива (т.н. ПЖРы – полуживые роботы [3])
• В 2054, про который пишется в романе, ПЖР уже уступят место еще более интеллектуально продвинутому «жидкому мозгу» [4]
#БПЛА #Война #ИИ #Роботы
1 www.wsj.com
2 www.penguinrandomhouse.com
3 https://t.iss.one/theworldisnoteasy/454
4 https://t.iss.one/theworldisnoteasy/654
_______
Источник | #theworldisnoteasy
@F_S_C_P
-------
поддержи канал
-------
WSJ
Essay | Drone Swarms Are About to Change the Balance of Military Power
On today’s battlefields, drones are a manageable threat. When hundreds of them can be harnessed to AI technology, they will become a tool of conquest.
DeepMind подготовил эволюционный скачок в миропонимании роботов.
Найден простой и эффективный способ обучения роботов, как людей.
Представьте, что к вам впервые пришел сотрудник сервиса по генеральной уборке офисов. Вы водите его по всем помещениям, показываете, что и где нужно сделать и чего делать нельзя: тут вымыть, там пропылесосить, шторы в конференц зале постирать, санузлы дезинфицировать, весь мусор собрать, но на столах ничего не трогать, прочистить бытовую технику от кофемашин до кондиционеров и т.д. и т.п.
Т.е. вы просто все показываете и рассказываете. А работник, если что-то не понятно, переспрашивает и уточняет. Причем, работник толковый. И если ему, например, специально не показывали на флипчарты в переговорных, а просто в конце тура по офису добавили – оторви все исписанные листы на флипчартах и, не путая их порядок, сложи на стол перед дверью в архив, - сотрудник сам найдет все флипчарты и сделает ровно так, как ему сказано.
Примерно так же, но даже без реального тура по офису, а просто засняв его на смартфон со своими комментариями, мы очень скоро будем учить роботов.
Информация к размышлению.
Эволюционное развитие у млекопитающих способностей осмысления окружающей среды и целенаправленной навигации передвижений заняло более 200 млн лет.
На много порядков меньшее время (всего какие-то несколько сотен тысяч лет) потребовалось для следующего «эволюционного скачка» в развитии самого когнитивно одаренного млекопитающего – людей. На освоение ими языков абстрактных понятий эволюции (уже не генной, а генно-культурной) потребовалось всего лишь несколько сотен тысяч лет.
У формирующегося на Земле нового небиологического (цифрового) вида эти процессы:
1. во-первых, идут с несопоставимо огромной скоростью;
2. а во-вторых, имеют обратную последовательность.
Последнее оказалось возможным из-за нематериальности и бестелесности «цифровых сущностей» генеративного ИИ на основе больших языковых моделей.
Сначала, они всего за пару лет эволюционировали до уровня людей в оперировании языками абстрактных понятий. А теперь, вселясь в тела роботов, они, скорее всего, за какие-то месяцы сделают второй «эволюционный скачок» – став «материализованными цифровыми сущностями».
Вместе с обретением тел они обретут способности осмысления окружающей среды и навигации своих передвижений в соответствии с намерениями и целями.
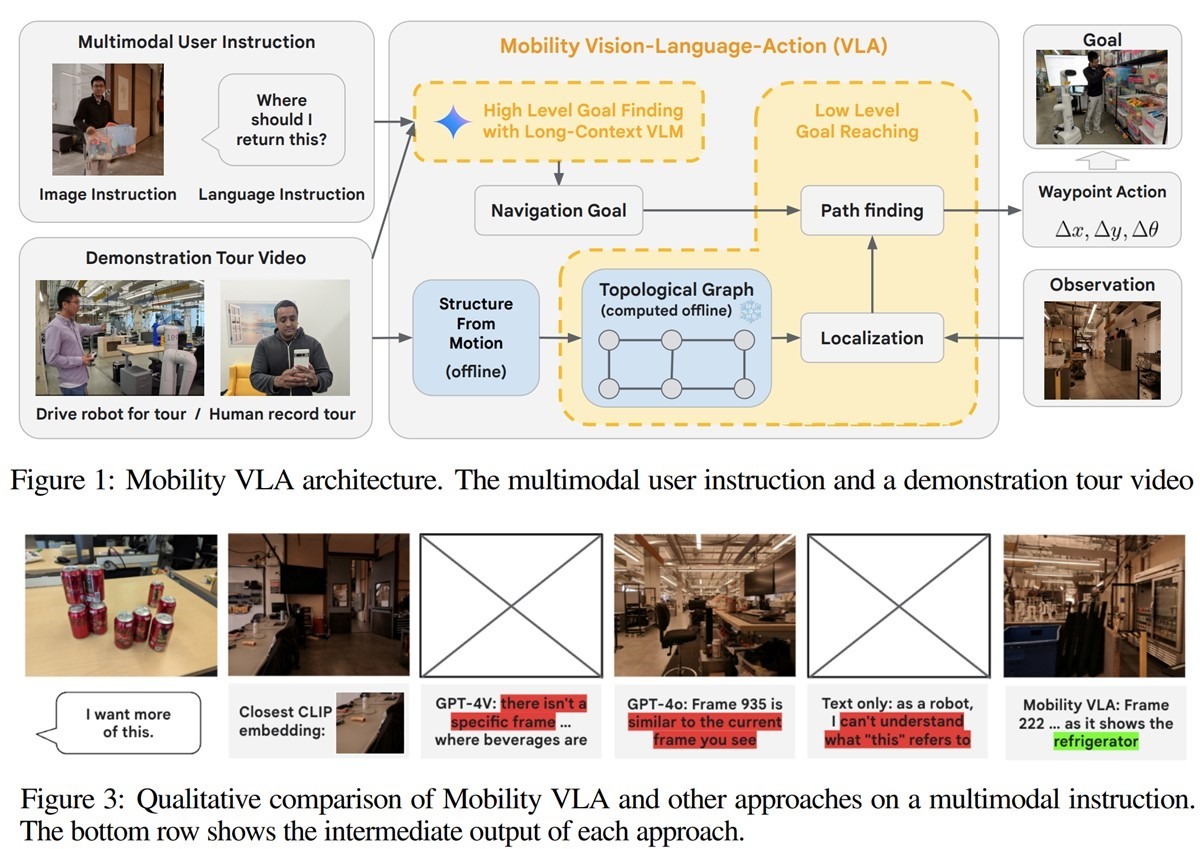
Представленная Google DeepMind система обучения роботов объединяет подсистему «мультимодальной навигации по инструкциям с демонстрационными турами (MINT)» и подсистему «интеграции зрения, языка и действий» Vision-Language-Action (VLA). Это объединение позволило интегрировать понимание окружающей среды и силу рассуждений на основе здравого смысла больших языковых моделей с огромным контекстным окном в 1.5 млн токенов.
Проще говоря, гении из DeepMind разработали способ, с помощью которого роботы понимают и ориентируются в сложных средах, используя комбинацию слов, изображений и видеотуров. При этом роботы могут получать от людей команды на выполнение действий в сложных средах мультимодально: устно, письменно, в виде картинок (карты, планы, схемы, идеограммы и т.д.), а также на основе жестов людей (типа объяснений на пальцах) и (в следующей версии) их мимики.
На представленных Google демо их система Mobility VLA на основе Gemini 1.5 Pro интеллектуально обходит GPT-4o и GPT-4V.
Напр. на обращение к роботу «Хочу еще вот этого» с показом пальцем на пустую банку колы, робот с Mobility VLA сам нашел холодильник, где этого добра было много. С чем прочие модели справились плохо (одни не поняли, что надо, другие – где это взять).
Картинка: архитектура Mobility VLA и сравнение с другими моделями telegra.ph
Статья arxiv.org
Видео демо x.com
#роботы
_______
Источник | #theworldisnoteasy
@F_S_C_P
Генерируй картинки с ⛵️MIDJOURNEY в Telegram
Найден простой и эффективный способ обучения роботов, как людей.
Представьте, что к вам впервые пришел сотрудник сервиса по генеральной уборке офисов. Вы водите его по всем помещениям, показываете, что и где нужно сделать и чего делать нельзя: тут вымыть, там пропылесосить, шторы в конференц зале постирать, санузлы дезинфицировать, весь мусор собрать, но на столах ничего не трогать, прочистить бытовую технику от кофемашин до кондиционеров и т.д. и т.п.
Т.е. вы просто все показываете и рассказываете. А работник, если что-то не понятно, переспрашивает и уточняет. Причем, работник толковый. И если ему, например, специально не показывали на флипчарты в переговорных, а просто в конце тура по офису добавили – оторви все исписанные листы на флипчартах и, не путая их порядок, сложи на стол перед дверью в архив, - сотрудник сам найдет все флипчарты и сделает ровно так, как ему сказано.
Примерно так же, но даже без реального тура по офису, а просто засняв его на смартфон со своими комментариями, мы очень скоро будем учить роботов.
Информация к размышлению.
Эволюционное развитие у млекопитающих способностей осмысления окружающей среды и целенаправленной навигации передвижений заняло более 200 млн лет.
На много порядков меньшее время (всего какие-то несколько сотен тысяч лет) потребовалось для следующего «эволюционного скачка» в развитии самого когнитивно одаренного млекопитающего – людей. На освоение ими языков абстрактных понятий эволюции (уже не генной, а генно-культурной) потребовалось всего лишь несколько сотен тысяч лет.
У формирующегося на Земле нового небиологического (цифрового) вида эти процессы:
1. во-первых, идут с несопоставимо огромной скоростью;
2. а во-вторых, имеют обратную последовательность.
Последнее оказалось возможным из-за нематериальности и бестелесности «цифровых сущностей» генеративного ИИ на основе больших языковых моделей.
Сначала, они всего за пару лет эволюционировали до уровня людей в оперировании языками абстрактных понятий. А теперь, вселясь в тела роботов, они, скорее всего, за какие-то месяцы сделают второй «эволюционный скачок» – став «материализованными цифровыми сущностями».
Вместе с обретением тел они обретут способности осмысления окружающей среды и навигации своих передвижений в соответствии с намерениями и целями.
Представленная Google DeepMind система обучения роботов объединяет подсистему «мультимодальной навигации по инструкциям с демонстрационными турами (MINT)» и подсистему «интеграции зрения, языка и действий» Vision-Language-Action (VLA). Это объединение позволило интегрировать понимание окружающей среды и силу рассуждений на основе здравого смысла больших языковых моделей с огромным контекстным окном в 1.5 млн токенов.
Проще говоря, гении из DeepMind разработали способ, с помощью которого роботы понимают и ориентируются в сложных средах, используя комбинацию слов, изображений и видеотуров. При этом роботы могут получать от людей команды на выполнение действий в сложных средах мультимодально: устно, письменно, в виде картинок (карты, планы, схемы, идеограммы и т.д.), а также на основе жестов людей (типа объяснений на пальцах) и (в следующей версии) их мимики.
На представленных Google демо их система Mobility VLA на основе Gemini 1.5 Pro интеллектуально обходит GPT-4o и GPT-4V.
Напр. на обращение к роботу «Хочу еще вот этого» с показом пальцем на пустую банку колы, робот с Mobility VLA сам нашел холодильник, где этого добра было много. С чем прочие модели справились плохо (одни не поняли, что надо, другие – где это взять).
Картинка: архитектура Mobility VLA и сравнение с другими моделями telegra.ph
Статья arxiv.org
Видео демо x.com
#роботы
_______
Источник | #theworldisnoteasy
@F_S_C_P
Генерируй картинки с ⛵️MIDJOURNEY в Telegram
{kind=link}
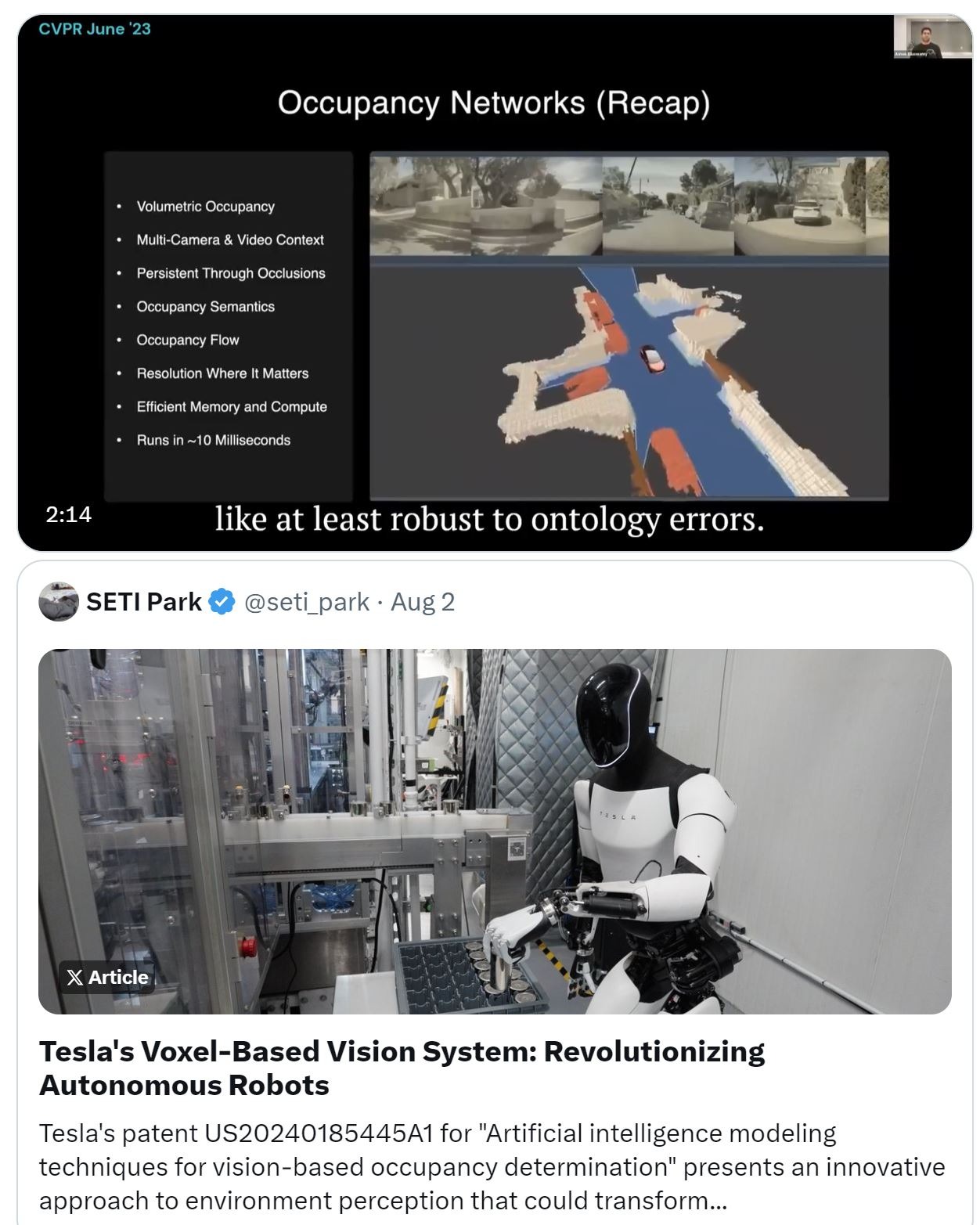
Революция Tesla в области автономных роботов.
Запатентован иной способ зрительного восприятия, отличный от придуманных эволюцией на Земле.
Tesla только что подала патент на систему зрительного восприятия окружающего мира мыслящими субъектами на базе ИИ (называемыми «эго») [1]
Это новая система зрения отличается от всех сформировавшихся эволюционно на Земле способов и механизмов зрения и названа Voxel-Based Vision (VBV) - зрение, основанное на вокселях.
Особенности VBV таковы.
• Кардинально меняется то, как автономные роботы воспринимают и ориентируются в окружающей среде: используются только данные с камеры без использования лидара или радара.
• VBV делит пространство на трехмерные воксели, прогнозируя занятость, форму, семантические данные и движение для каждого вокселя в режиме реального времени.
VBV предназначена для работы на бортовом компьютере робота (как в автомобили Tesla, так и в человекоподобных роботах, типа Optimus, и позволяет принимать решения о действиях в пространстве практически мгновенно (в реальном времени).
VBV позволяет роботу самостоятельно и без предварительной подготовки ориентироваться в разнообразных средах и адаптироваться к изменениям в реальном времени. Это устраняет необходимость в обширном предварительном картографировании и ускоряет появление доступных автономных роботов.
Революционную суть изобретенной технологии можно также сформулировать так.
✔️ Процесс зрения (видения) происходит не в глазах, а в мозге.
✔️ Т.к. способность видеть окружающий мир столь полезна, эволюция сформировала процессы видения множество раз и по разным траекториям (для разных животных).
✔️ Например, глаза осьминога поразительно похожи на наши (и это при том, что нашим последним общим предком было слепое морское существо, типа слизняка или улитки, жившее более полумиллиарда лет назад).
✔️ Однако VBV в принципе отличается от всех придуманных эволюцией траекторий, будучи оптимален для ИИ, а не для биологического мозга.
Прототип VBV был доложен на конференции год назад [2].
За год систему довели и теперь запатентовали.
Картинка telegra.ph
1 x.com
2 www.youtube.com
#Роботы #Зрение
_______
Источник | #theworldisnoteasy
@F_S_C_P
1 Blum = $0.019:
Попробуй Blum
Запатентован иной способ зрительного восприятия, отличный от придуманных эволюцией на Земле.
Tesla только что подала патент на систему зрительного восприятия окружающего мира мыслящими субъектами на базе ИИ (называемыми «эго») [1]
Это новая система зрения отличается от всех сформировавшихся эволюционно на Земле способов и механизмов зрения и названа Voxel-Based Vision (VBV) - зрение, основанное на вокселях.
Особенности VBV таковы.
• Кардинально меняется то, как автономные роботы воспринимают и ориентируются в окружающей среде: используются только данные с камеры без использования лидара или радара.
• VBV делит пространство на трехмерные воксели, прогнозируя занятость, форму, семантические данные и движение для каждого вокселя в режиме реального времени.
VBV предназначена для работы на бортовом компьютере робота (как в автомобили Tesla, так и в человекоподобных роботах, типа Optimus, и позволяет принимать решения о действиях в пространстве практически мгновенно (в реальном времени).
VBV позволяет роботу самостоятельно и без предварительной подготовки ориентироваться в разнообразных средах и адаптироваться к изменениям в реальном времени. Это устраняет необходимость в обширном предварительном картографировании и ускоряет появление доступных автономных роботов.
Революционную суть изобретенной технологии можно также сформулировать так.
✔️ Процесс зрения (видения) происходит не в глазах, а в мозге.
✔️ Т.к. способность видеть окружающий мир столь полезна, эволюция сформировала процессы видения множество раз и по разным траекториям (для разных животных).
✔️ Например, глаза осьминога поразительно похожи на наши (и это при том, что нашим последним общим предком было слепое морское существо, типа слизняка или улитки, жившее более полумиллиарда лет назад).
✔️ Однако VBV в принципе отличается от всех придуманных эволюцией траекторий, будучи оптимален для ИИ, а не для биологического мозга.
Прототип VBV был доложен на конференции год назад [2].
За год систему довели и теперь запатентовали.
Картинка telegra.ph
1 x.com
2 www.youtube.com
#Роботы #Зрение
_______
Источник | #theworldisnoteasy
@F_S_C_P
1 Blum = $0.019:
Попробуй Blum
{kind=link}
Созданы первые биомиметические роботы, как в «Мире Дикого Запада».
Clone Alpha - гуманоидный робот с синтетическими органами и искусственными мышцами, работающими на воде.
Еще и еще раз буду повторять это: вхождение техно-прогресса в область сингулярности сжимает время до появления очередной прорывной техно-новации с десятилетий до дней.
Вот кто мог подумать, что биомиметические роботы, как в «Мире Дикого Запада», появятся не через десятилетия, а спустя всего несколько месяцев после моего поста о «революции роботов»?
К концу 2024 уже никого не удивляют человекоподобные фигуры и передвижения роботов андроидов. Но вот представить среди нас андроидов с биомиметической архитектурой еще год назад могли лишь сценаристы Голливуда.
А слово биомиметическая в названии архитектуры этих роботов означает использование синтетических версий систем органов человека:
• искусственные мышцы, называемые миофибрами, которые сокращаются под действием давления воды (миофибры могут сокращаться на 30% менее чем за 50 миллисекунд, создавая при этом килограмм силы всего из трех граммов материала);
• полимерный скелет с 206 аналогами костей (сочлененных суставами с искусственными связками с десятками степеней свободы) и гидравлической «сосудистой системой», работающей от компактного полукиловаттного насоса;
• нервная система на базе «Cybernet», визуально-моторной модели Clone, с четырьмя камерами глубины для отслеживания окружающей среды.
Все это, по словам разработчиков, обеспечивает скорость, точность и ловкость движений роботов, делающих их неотличимыми от людей.
«По словам разработчиков» означает, что биомиметический андроид Clone Alpha засекречен донельзя, и потому журналистам его пока не показывают.
Известно лишь, что:
• биомиметическая рука этого андроида прошла испытания и показывалась в действии (ловко махала 7-килограммовой гантелей);
• заказы на первые 3 сотни целиковых андроидов Clone Alpha принимаются с исполнением в первом полугодии 2025 (про цену лишь слухи).
Пока же все с нетерпением ждут демонстрацию и больше информации. Ибо, если объявленное подтвердится, то уже в 2025 могут появиться первые варианты проектов, типа показанного в сериале «Мир Дикого Запада».
#Роботы
_______
Источник | #theworldisnoteasy
@F_S_C_P
Стань спонсором!
Clone Alpha - гуманоидный робот с синтетическими органами и искусственными мышцами, работающими на воде.
Еще и еще раз буду повторять это: вхождение техно-прогресса в область сингулярности сжимает время до появления очередной прорывной техно-новации с десятилетий до дней.
Вот кто мог подумать, что биомиметические роботы, как в «Мире Дикого Запада», появятся не через десятилетия, а спустя всего несколько месяцев после моего поста о «революции роботов»?
К концу 2024 уже никого не удивляют человекоподобные фигуры и передвижения роботов андроидов. Но вот представить среди нас андроидов с биомиметической архитектурой еще год назад могли лишь сценаристы Голливуда.
А слово биомиметическая в названии архитектуры этих роботов означает использование синтетических версий систем органов человека:
• искусственные мышцы, называемые миофибрами, которые сокращаются под действием давления воды (миофибры могут сокращаться на 30% менее чем за 50 миллисекунд, создавая при этом килограмм силы всего из трех граммов материала);
• полимерный скелет с 206 аналогами костей (сочлененных суставами с искусственными связками с десятками степеней свободы) и гидравлической «сосудистой системой», работающей от компактного полукиловаттного насоса;
• нервная система на базе «Cybernet», визуально-моторной модели Clone, с четырьмя камерами глубины для отслеживания окружающей среды.
Все это, по словам разработчиков, обеспечивает скорость, точность и ловкость движений роботов, делающих их неотличимыми от людей.
«По словам разработчиков» означает, что биомиметический андроид Clone Alpha засекречен донельзя, и потому журналистам его пока не показывают.
Известно лишь, что:
• биомиметическая рука этого андроида прошла испытания и показывалась в действии (ловко махала 7-килограммовой гантелей);
• заказы на первые 3 сотни целиковых андроидов Clone Alpha принимаются с исполнением в первом полугодии 2025 (про цену лишь слухи).
Пока же все с нетерпением ждут демонстрацию и больше информации. Ибо, если объявленное подтвердится, то уже в 2025 могут появиться первые варианты проектов, типа показанного в сериале «Мир Дикого Запада».
#Роботы
_______
Источник | #theworldisnoteasy
@F_S_C_P
Стань спонсором!
Telegram
Малоизвестное интересное
Созданы первые биомиметические роботы, как в «Мире Дикого Запада».
Clone Alpha - гуманоидный робот с синтетическими органами и искусственными мышцами, работающими на воде.
Еще и еще раз буду повторять это: вхождение техно-прогресса в область сингулярности…
Clone Alpha - гуманоидный робот с синтетическими органами и искусственными мышцами, работающими на воде.
Еще и еще раз буду повторять это: вхождение техно-прогресса в область сингулярности…